General
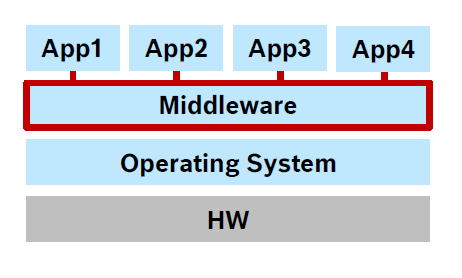
Middleware is software that sits between the operating system and the application software of a computer system. The purpose of middleware in automotive embedded systems is to decouple the application software with the business logic from the underlying hardware. This fosters the reuse of the application software across different hardware platforms and generations.
Middleware provides a set of services and functions that applications can use to interact with the underlying hardware and other system components. It also establishes the communication between different applications or software components that sit on top of the middleware. It can include functionality such as data transfer, memory management, security, and communication. It is designed to be modular and flexible, allowing different applications to use different components of the middleware as needed.
The term AD Cycle stands Autonomous Development Cylce and is a conceptual reference model for developing ADAS/AD systems.
It contains the typical development steps and phases (Develop - Deploy - Build - Drive - Measure - Record - Store - Analyze & Validate) and connects them to an efficient, iterative development cycle.
ETAS Deterministic Middleware Solution provides safety-certified, middleware-based software for advanced driving and autonomous vehicles.
The ETAS Deterministic Middleware Solution SDK is a software development kit for developing and running ADAS/AD applications comprising a runtime for µP/POSIX based platforms and development tools. It enables software engineers to develop ADAS/AD applications with the highest standards in safety, security, performance, efficiency, maintainability, and usability.
ETAS Deterministic Middleware Solution can be combined with other middleware-based solutions for microprocessor-based platforms such as ETAS VRTE. Through this, middleware services that are not part of ETAS Deterministic Middleware Solution can be integrated and utliized.
Determinism refers to the predictability and consistency of the system’s behavior in response to stimuli or events.
A deterministic system always produces the same output for a given set of inputs and conditions. This property is crucial in real-time systems where timely and predictable responses are essential.
In real-time embedded systems development, determinism can be further distinguihed into time determinism and data determinism. Both are important and can serve different purposes. Understanding the quintessential differences is thus important.
Read more about Determinism in real-time embedded systems.
The following article explains the key differences between microcontroller and microprocessor-based embedded real-time systems and elaborates on why achieving true time-deterministic behavior is a challenge on microprocessor-based systems.
Deterministic behavior on microcontroller and microprocessor-based embedded systems
Middleware is crucial for Advanced Driver Assistance Systems (ADAS) and Autonomous Driving (AD) systems:
-
Decoupling Software and Hardware: Middleware enables the separation of application software from underlying hardware, promoting flexibility. This decoupling allows for the reuse of application software across different hardware platforms, streamlining development and ensuring adaptability to evolving technologies.
-
Establishing Communication: Middleware facilitates seamless communication between diverse components in ADAS and AD systems. By providing standardized interfaces, middleware ensures efficient data exchange among sensors, control units, and other system elements, fostering interoperability and cohesiveness in the system architecture.
No, ETAS DMS does not only work with Bosch hardware.
As a software, ETAS DMS is generally HW-agnostic. If your applications rely on HW accelerators, SoC specific support is also available.
It requires a POSIX-based operating system such as QNX or Linux.
ETAS DMS has the following prerequisites:
- A micro-processor based ADAS/AD hardware platform
- A POSIX-based operating system (e.g., QNX, Linux)
Yes, ETAS DMS SDK can be evaluated.
Please contact us to get you started.
ETAS DMS is constraining the order of execution of processes to guarantee reproducible behavior.
In this way, a defined execution order can be achieved in a dynamic system.
Read more about Scheduling Mechanisms in ETAS DMS Read more about Deterministic Recompute and Virtual Drives and how they can accelerate your development
ETAS DMS supports the C++17 standard. C++20 will be supported in future update as we transition to QOS8 and gcc-10.